
開発目的
災害多発国である日本において、発災時に迅速に人命救助を行うためにより素早く人命探索を行う必要がある。
近年は、ドローンを用いた上空からの情報収集が実用化されつつあるが、バッテリー容量に起因した飛行時間の制約が課題となっている。そこで捜索用ドローンの稼働時間を長くするために、交換用バッテリーを運搬する「バッテリー交換ドローン」を開発し、捜索を行っている遠隔地で自動でバッテリーを交換することにより、バッテリーが原因となるダウンタイム(交換のために移動する時間や実際に交換する時間)を最小限に抑える。
役割
企画、ハードウェア開発、ソフトウェア開発
使用したソフトウェア(S)、機器(H)
| (S) CAD / CAE | Solidworks |
| (H) 3Dプリンター | Bambu Lab X1-Carbon |
| (S) スライサー | Bambu Studio |
| (S) プログラミング言語 | C++ Lua Script |
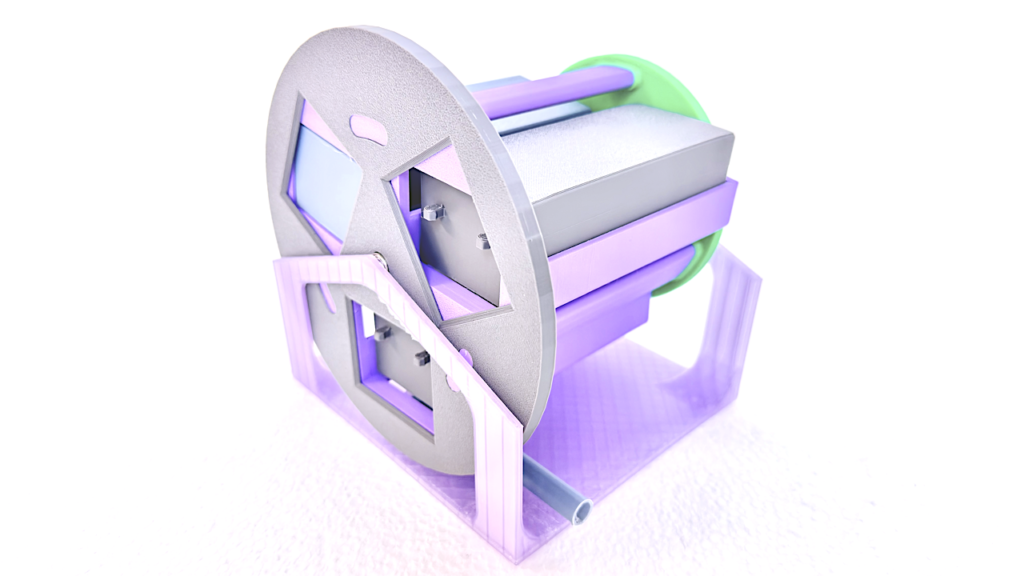
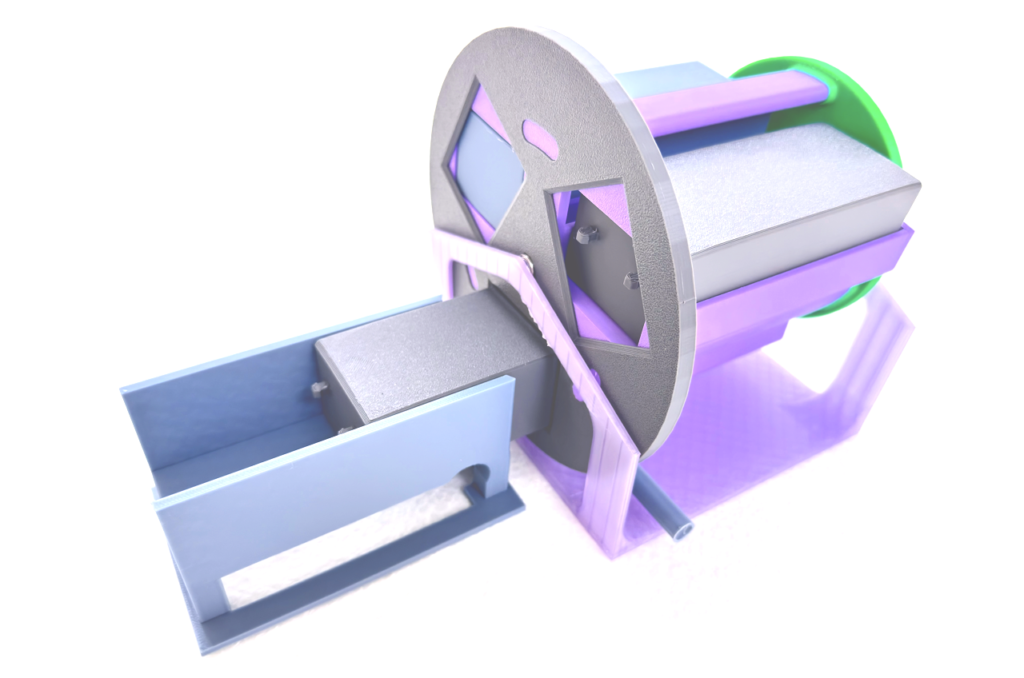
特徴
- 円形にバッテリーを配置し、省スペースで多くのバッテリーを運ぶことが可能。
- バッテリーの選択、移動、固定を回転動作だけで完結できるシンプルな構造
- 別機体の「陸空両用ドローン」のシステムと連携し、完全自動でバッテリー交換をすることができる(開発中)
工夫した点
過酷な災害現場で稼働することを踏まえ、シンプルな構造にすることにこだわった。特に、バッテリーをどのように積載するかについて、検討することに苦労した。工場のライン生産で用いられる機構を参考に、CAD上で様々な形状をシミュレーションし、搬送効率と気候の複雑さの観点から検討した。モータとギヤの回転動作だけで必要な動作を完結させることができるようにしたのは、このシステムの大きな強みだと感じている。
今後の展望
- バッテリー把持部を組み込んだ、機体本体の設計・開発
- 陸空両用ドローンとの協調制御の実装