開発目的
災害多発国である日本において、発災時に迅速に人命救助を行うためにより素早く人命探索を行う必要がある。
近年は、ドローンを用いた上空からの情報収集が実用化されつつあるが、災害現場での運用では、天候による飛行制限や、操縦の困難さ、飛行時間の制約といった問題点がある。これらの課題を解決するために、クローラ機構を有し地上走行が可能な陸空両用ドローンを開発した。
役割
企画、ハードウェア開発、ソフトウェア開発
使用したソフトウェア、機器
| CAD / CAE | Autodesk Inventor |
| フライトシステム | ArduPilot |
| オペレーティングシステム | ROS2 Humble |
| スライサー | Bambu Studio |
| 3Dプリンタ | Bambu Lab X1-Carbon |
| プログラミング言語 | Lua Script |
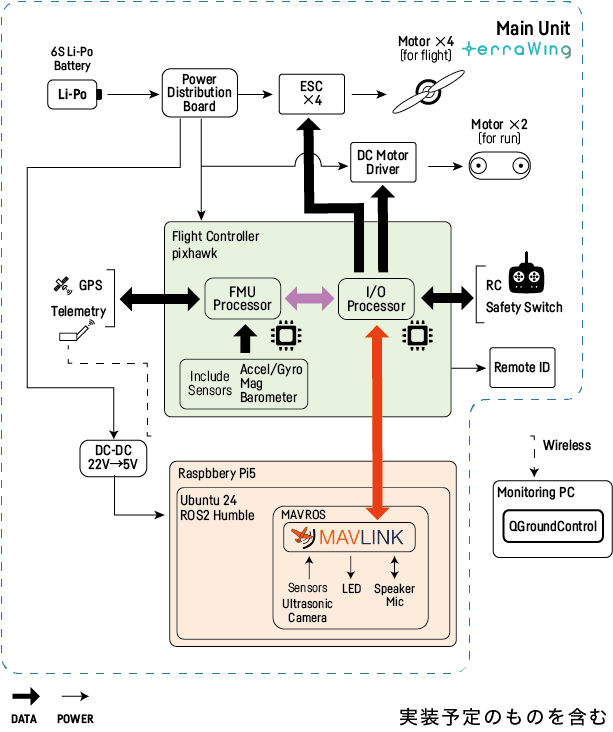
システム概要
| モータ | T-Motor U5 KV400 |
| プロペラ | T-Motor Fa15.2×5 |
| ESC | ALPHA 60A 6S |
| FC | Holybro Pixhawk 6X |
| コンピュータ | Raspberry Pi Computer Module 4 |
| 開発ボード | Holybro Pixhawk RPi CM4 Baseboard |